
In the heart of your vehicle's complex electronic system lies a silent hero that ensures everything runs smoothly - the Controller Area Network (CAN) Protocol. This unsung hero facilitates communication between the myriad of electronic components in your car. In this blog post, we'll dive into the world of the CAN Protocol, unravel its workings, and discover its vital role in the automotive industry, including in-depth details about bus arbitration and collision handling.
What is the CAN Protocol?
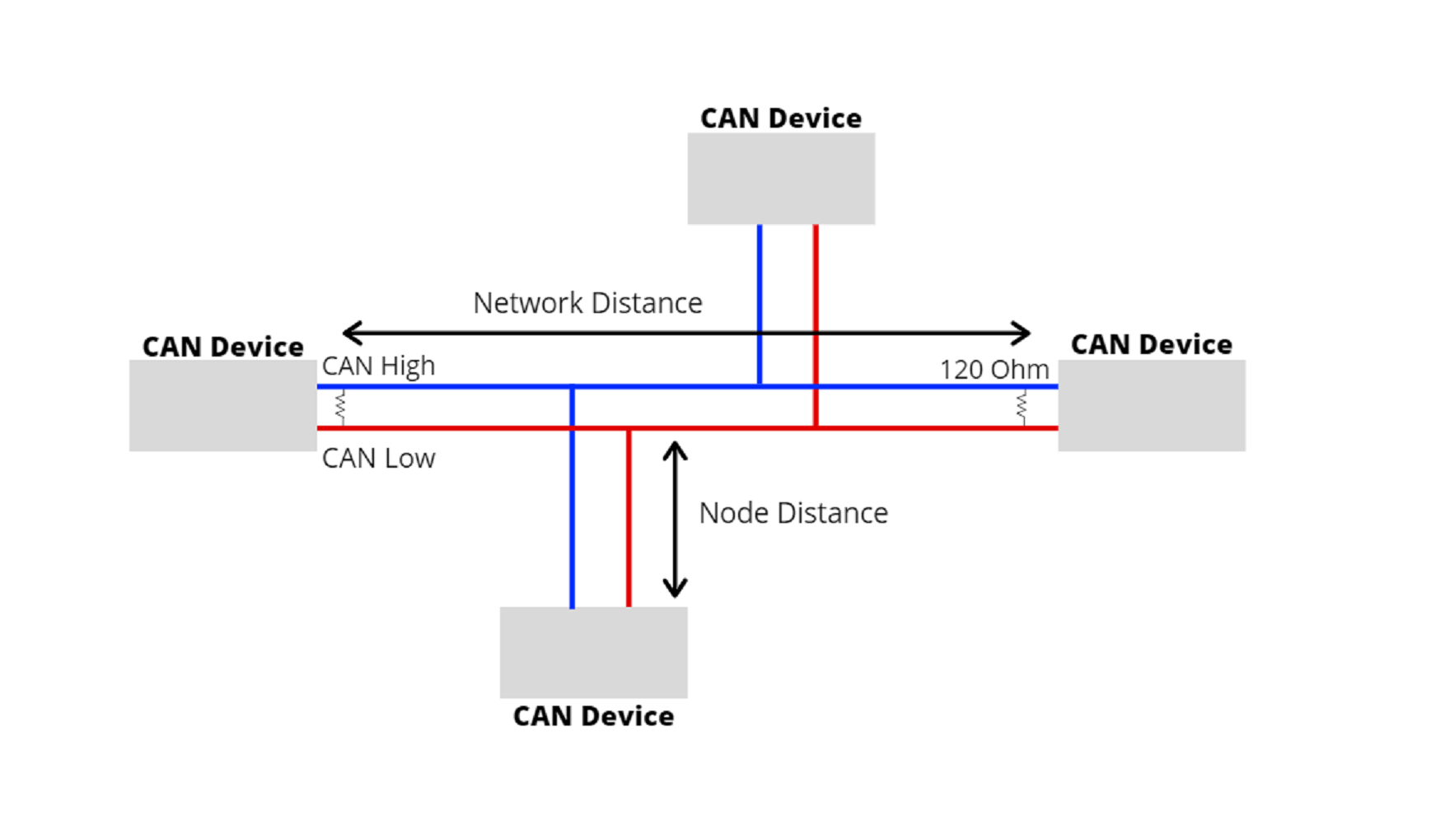
The CAN Protocol is a robust, message-based protocol designed to facilitate real-time communication between electronic control units (ECUs) in your vehicle. It operates on a two-wire communication system, featuring a twisted-pair bus for High-speed CAN (HS-CAN) and a separate bus for Low-speed CAN (LS-CAN). HS-CAN handles critical, time-sensitive messages, such as engine parameters and safety systems, while LS-CAN manages less time-critical functions like interior lighting.
Why is it Needed?
In a modern vehicle, electronic control units (ECUs) are spread throughout, controlling various aspects, from engine performance to infotainment systems. The CAN Protocol is the digital backbone, ensuring that these ECUs can communicate efficiently and reliably. It is essential to prevent chaos and conflicts among these systems, much like a central communication hub in a bustling city.
CAN frame constitues of
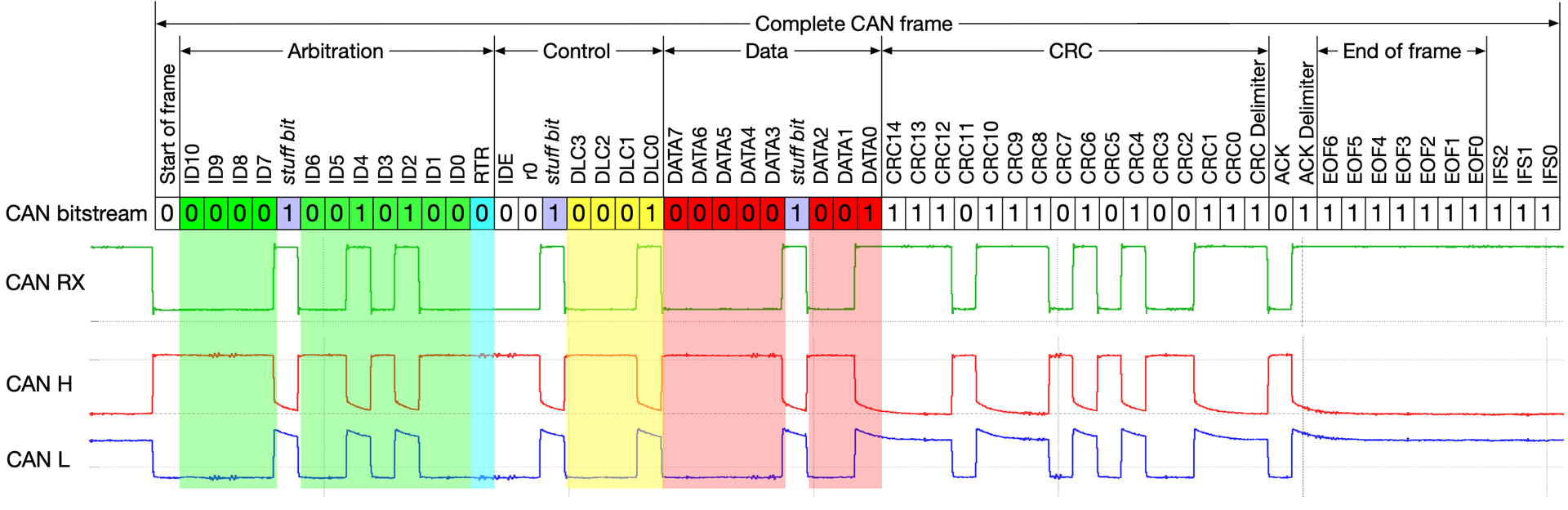
Start of Frame (SOF): This bit signals the beginning of a CAN Frame transmission.
Arbitration Field: It consists of the Identifier (ID) which helps in bus arbitration. Messages with lower ID values have higher priority and get transmitted first.
Control Field: This field includes the Data Length Code (DLC) indicating the number of bytes of data in the message.
Data Field: This is where the actual information is contained, such as engine parameters, sensor data, or control commands.
Frame Check Sequence (FCS): FCS is used for error checking. It verifies that the data received is error-free.
End of Frame (EOF): Marks the end of the CAN Frame transmission.
Bus Arbitration: Who Gets to Talk?
Bus arbitration is a pivotal concept in the world of the CAN Protocol. It's how electronic control units (ECUs) within your vehicle determine which message gets transmitted when multiple ECUs want to communicate simultaneously. This process maintains order in the digital conversation, much like a traffic signal at a busy intersection.
CAN employs a priority-based system to decide which message takes precedence. Each message on the bus is assigned a unique identifier called a CAN ID. Messages with lower numerical CAN IDs have higher priority. When two or more ECUs attempt to transmit data at the same time, the ECU with the lowest CAN ID takes the lead, ensuring that critical, high-priority messages, such as those concerning engine safety or braking, are delivered promptly.
This process is akin to vehicles at an intersection obeying traffic rules. The vehicle with the right-of-way goes first, preventing chaos and ensuring an organized flow of information on the CAN bus. Bus arbitration, therefore, is the essential traffic controller in your car's digital network.
Collision Detection and Avoidance: Keeping the Peace
To prevent data collisions on the bus, the CAN Protocol employs a method known as CSMA/CD (Carrier Sense Multiple Access with Collision Detection). When an ECU wants to send a message, it first listens to the bus to check if it's idle. If the bus is clear, it proceeds to transmit. However, if another ECU happens to start transmitting at the same time, both ECUs detect the collision and cease transmission, reducing the likelihood of corrupted data.
Following the collision detection, a backoff algorithm is initiated, causing each ECU to wait for a random duration before retrying. This randomness helps avoid recurrent collisions and maintains efficient bus utilization, resembling a carefully coordinated conversation where participants take turns speaking to maintain order.
Real-life Example: Your Morning Commute Revisited
When you start your car, a symphony of ECUs come to life. The engine control unit (ECU) communicates with the transmission control unit (TCU) to ensure your car shifts gears smoothly. Meanwhile, the body control module (BCM) may signal your car's lights to turn on. The CAN Protocol orchestrates these conversations with precision, prioritizing critical messages and preventing data collisions, akin to a skilled moderator managing a dynamic discussion.
The Future of the CAN Protocol
As vehicles become increasingly complex and interconnected, the CAN Protocol continues to evolve. Modern cars often feature multiple CAN buses, each dedicated to specific functions like infotainment, powertrain, or safety. This segmentation ensures that various ECUs can communicate efficiently and that critical systems remain isolated from non-critical ones.
In Conclusion
The CAN Protocol serves as the unsung hero in your vehicle, ensuring all your car's components collaborate seamlessly. It does this by employing bus arbitration and collision detection and avoidance, creating a well-orchestrated conversation among ECUs. So, the next time you start your car, remember the CAN Protocol, quietly ensuring everything runs smoothly behind the scenes, much like a maestro conducting a complex symphony, directing each instrument with precision and harmony.